З развіццём матэрыялаў з рэдказямельных пастаянных магнітаў у 1970-х гадах з'явіліся рухавікі з пастаяннымі магнітамі з рэдказямельных элементаў. Рухавікі з пастаяннымі магнітамі выкарыстоўваюць рэдказямельныя пастаянныя магніты для ўзбуджэння, і пастаянныя магніты могуць генераваць пастаянныя магнітныя палі пасля намагнічвання. Іх характарыстыкі ўзбуджэння выдатныя, і яны пераўзыходзяць рухавікі з электрычным узбуджэннем з пункту гледжання стабільнасці, якасці і зніжэння страт, што пахіснула традыцыйны рынак рухавікоў.
У апошнія гады, з хуткім развіццём сучаснай навукі і тэхналогій, прадукцыйнасць і тэхналогія электрамагнітных матэрыялаў, асабліва рэдказямельных электрамагнітных матэрыялаў, паступова паляпшаліся. У спалучэнні з хуткім развіццём сілавой электронікі, тэхналогій перадачы энергіі і тэхналогій аўтаматычнага кіравання, прадукцыйнасць сінхронных рухавікоў з пастаяннымі магнітамі становіцца ўсё лепшай і лепшай.
Акрамя таго, сінхронныя рухавікі з пастаяннымі магнітамі маюць такія перавагі, як малая вага, простая канструкцыя, невялікія памеры, добрыя характарыстыкі і высокая шчыльнасць магутнасці. Многія навукова-даследчыя ўстановы і прадпрыемствы актыўна праводзяць даследаванні і распрацоўкі ў галіне сінхронных рухавікоў з пастаяннымі магнітамі, і вобласці іх прымянення будуць пашырацца.
1. Асновы распрацоўкі сінхроннага рухавіка з пастаяннымі магнітамі
a.Ужыванне высокапрадукцыйных рэдказямельных пастаянных магнітных матэрыялаў
Рэдказямельныя пастаянныя магнітныя матэрыялы прайшлі тры стадыі: SmCo5, Sm2Co17 і Nd2Fe14B. У цяперашні час пастаянныя магнітныя матэрыялы, прадстаўленыя NdFeB, сталі найбольш шырока выкарыстоўваным тыпам рэдказямельных пастаянных магнітных матэрыялаў дзякуючы сваім выдатным магнітным уласцівасцям. Распрацоўка матэрыялаў для пастаянных магнітаў стымулявала распрацоўку рухавікоў з пастаяннымі магнітамі.
У параўнанні з традыцыйным трохфазным асінхронным рухавіком з электрычным узбуджэннем, пастаянны магніт замяняе полюс электрычнага ўзбуджэння, спрашчае канструкцыю, ліквідуе кантактнае кольца і шчотку ротара, рэалізуе бесшчоткавую канструкцыю і памяншае памер ротара. Гэта паляпшае шчыльнасць магутнасці, шчыльнасць крутоўнага моманту і эфектыўнасць рухавіка, робіць рухавік меншым і лягчэйшым, што яшчэ больш пашырае вобласць яго прымянення і спрыяе развіццю электрарухавікоў у бок большай магутнасці.
b. Прымяненне новай тэорыі кіравання
У апошнія гады алгарытмы кіравання хутка развіваліся. Сярод іх алгарытмы вектарнага кіравання ў прынцыпе вырашылі праблему стратэгіі кіравання рухавікамі пераменнага току, забяспечыўшы рухавікі пераменнага току добрымі характарыстыкамі кіравання. З'яўленне прамога кіравання крутоўным момантам спрашчае структуру кіравання і мае характарыстыкі высокай прадукцыйнасці схемы для змены параметраў і хуткай дынамічнай хуткасці рэакцыі крутоўнага моманту. Тэхналогія ўскоснага кіравання крутоўным момантам вырашае праблему вялікіх пульсацый крутоўнага моманту прамога крутоўнага моманту на нізкай хуткасці, а таксама паляпшае хуткасць і дакладнасць кіравання рухавіком.
c.Ужыванне высокапрадукцыйных сілавых электронных прылад і працэсараў
Сучасная тэхналогія сілавой электронікі з'яўляецца важным інтэрфейсам паміж інфармацыйнай індустрыяй і традыцыйнымі галінамі прамысловасці, а таксама мастом паміж слабым токам і кіраваным моцным токам. Развіццё тэхналогіі сілавой электронікі дазваляе рэалізоўваць стратэгіі кіравання прывадамі.
У 1970-х гадах з'явілася серыя інвертараў агульнага прызначэння, якія маглі пераўтвараць энергію прамысловай частаты ў энергію зменнай частаты з плаўна рэгуляванай частатой, тым самым ствараючы ўмовы для рэгулявання хуткасці пераменнага току са зменнай частатой. Гэтыя інвертары мелі магчымасць мяккага пуску пасля ўсталёўкі частаты, прычым частата магла павялічвацца ад нуля да зададзенай частаты з пэўнай хуткасцю, прычым хуткасць павелічэння магла плаўна рэгулявацца ў шырокім дыяпазоне, вырашаючы праблему запуску сінхронных рухавікоў.
2. Стан развіцця сінхронных рухавікоў з пастаяннымі магнітамі ў краіне і за мяжой
Першым у гісторыі рухавіком быў рухавік з пастаяннымі магнітамі. У той час характарыстыкі матэрыялаў з пастаяннымі магнітамі былі адносна нізкімі, а каэрцытыўная сіла і астаткавая сіла пастаянных магнітаў былі занадта нізкімі, таму яны неўзабаве былі заменены рухавікамі з электрычным узбуджэннем.
У 1970-х гадах рэдказямельныя пастаянныя магнітныя матэрыялы, прадстаўленыя NdFeB, валодалі вялікай каэрцытыўнай сілай, рэманентнасцю, моцнай здольнасцю да размагнічвання і вялікім магнітным прадуктам энергіі, што дазволіла стварыць магутныя сінхронныя рухавікі з пастаяннымі магнітамі. Цяпер даследаванні ў галіне сінхронных рухавікоў з пастаяннымі магнітамі становяцца ўсё больш і больш сталымі і развіваюцца ў напрамку высокай хуткасці, высокага крутоўнага моманту, высокай магутнасці і высокай эфектыўнасці.
У апошнія гады, дзякуючы значным інвестыцыям айчынных навукоўцаў і ўрада, сінхронныя рухавікі з пастаяннымі магнітамі хутка развіваліся. З развіццём мікракамп'ютэрных тэхналогій і тэхналогій аўтаматычнага кіравання, сінхронныя рухавікі з пастаяннымі магнітамі шырока выкарыстоўваюцца ў розных галінах. З развіццём грамадства патрабаванні людзей да сінхронных рухавікоў з пастаяннымі магнітамі сталі больш жорсткімі, што прымусіла рухавікі з пастаяннымі магнітамі развівацца ў бок большага дыяпазону рэгулявання хуткасці і больш высокай дакладнасці кіравання. Дзякуючы ўдасканаленню сучасных вытворчых працэсаў, былі далей распрацаваны высокапрадукцыйныя матэрыялы для пастаянных магнітаў. Гэта значна зніжае іх кошт і паступова прымяняе іх у розных сферах жыцця.
3. Сучасныя тэхналогіі
а. Тэхналогія праектавання сінхроннага рухавіка з пастаяннымі магнітамі
У параўнанні са звычайнымі электрарухавікамі ўзбуджэння, сінхронныя рухавікі з пастаяннымі магнітамі не маюць электрычных абмотак узбуджэння, калектарных кольцаў і корпусаў узбуджэння, што значна паляпшае не толькі стабільнасць і надзейнасць, але і эфектыўнасць.
Сярод іх убудаваныя рухавікі з пастаяннымі магнітамі маюць такія перавагі, як высокая эфектыўнасць, высокі каэфіцыент магутнасці, высокая шчыльнасць магутнасці адзінкі, моцная магчымасць пашырэння хуткасці пры слабых магнітных зарадах і высокая дынамічная хуткасць водгуку, што робіць іх ідэальным выбарам для кіравання рухавікамі.
Пастаянныя магніты забяспечваюць усё магнітнае поле ўзбуджэння рухавікоў з пастаяннымі магнітамі, а крутоўны момант зубчастых рычагоў павялічвае вібрацыю і шум рухавіка падчас працы. Празмерны крутоўны момант зубчастых рычагоў паўплывае на нізкахуткасную працу сістэмы кіравання хуткасцю рухавіка і высокадакладнае пазіцыянаванне сістэмы кіравання становішчам. Таму пры праектаванні рухавіка крутоўны момант зубчастых рычагоў неабходна максімальна знізіць шляхам аптымізацыі рухавіка.
Згодна з даследаваннямі, агульныя метады зніжэння моманту зубчастага ходу ўключаюць змяненне каэфіцыента дугі полюса, памяншэнне шырыні шчыліны статара, супастаўленне касой шчыліны і шчыліны полюса, змяненне становішча, памеру і формы магнітнага полюса і г.д. Аднак варта адзначыць, што зніжэнне моманту зубчастага ходу можа паўплываць на іншыя характарыстыкі рухавіка, напрыклад, адпаведна можа паменшыцца электрамагнітны момант. Таму пры праектаванні розныя фактары павінны быць максімальна збалансаваны для дасягнення найлепшай прадукцыйнасці рухавіка.
b.Тэхналогія мадэлявання сінхроннага рухавіка з пастаяннымі магнітамі
Наяўнасць пастаянных магнітаў у рухавіках з пастаяннымі магнітамі ўскладняе для канструктараў разлік такіх параметраў, як каэфіцыент патоку рассейвання без нагрузкі і каэфіцыент дугі полюса. Як правіла, для разліку і аптымізацыі параметраў рухавікоў з пастаяннымі магнітамі выкарыстоўваецца праграмнае забеспячэнне для аналізу канчатковых элементаў. Праграмнае забеспячэнне для аналізу канчатковых элементаў можа вельмі дакладна разлічваць параметры рухавіка, і яго выкарыстанне вельмі надзейнае для аналізу ўплыву параметраў рухавіка на прадукцыйнасць.
Метад разліку канчатковых элементаў дазваляе прасцей, хутчэй і дакладней разлічваць і аналізаваць электрамагнітнае поле рухавікоў. Гэта лікавы метад, распрацаваны на аснове дыферэнцыяльнага метаду, які шырока выкарыстоўваецца ў навуцы і тэхніцы. Выкарыстоўвайце матэматычныя метады для дыскрэтызацыі некаторых бесперапынных абласцей рашэнняў на групы адзінак, а затым інтэрпалюйце ў кожнай адзінцы. Такім чынам фарміруецца лінейная інтэрпаляцыйная функцыя, гэта значыць прыблізная функцыя мадэлюецца і аналізуецца з дапамогай канчатковых элементаў, што дазваляе нам інтуітыўна назіраць за кірункам ліній магнітнага поля і размеркаваннем шчыльнасці магнітнага патоку ўнутры рухавіка.
c. Тэхналогія кіравання сінхронным рухавіком з пастаяннымі магнітамі
Паляпшэнне прадукцыйнасці сістэм прывада рухавікоў таксама мае вялікае значэнне для развіцця галіны прамысловага кіравання. Гэта дазваляе кіраваць сістэмай з найлепшай прадукцыйнасцю. Яе асноўныя характарыстыкі адлюстроўваюцца ў нізкай хуткасці, асабліва ў выпадку хуткага запуску, статычнага паскарэння і г.д., яна можа выдаваць вялікі крутоўны момант; а пры руху на высокай хуткасці яна можа дасягнуць пастаяннага кіравання магутнасцю і хуткасцю ў шырокім дыяпазоне. У табліцы 1 параўноўваюцца прадукцыйнасць некалькіх асноўных рухавікоў.
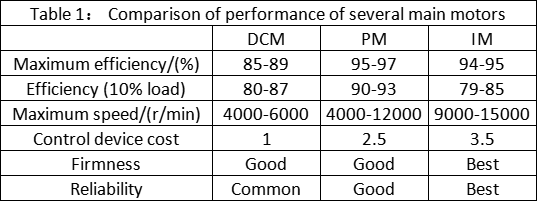
Як відаць з Табліцы 1, рухавікі з пастаяннымі магнітамі маюць добрую надзейнасць, шырокі дыяпазон хуткасцей і высокую эфектыўнасць. У спалучэнні з адпаведным метадам кіравання ўся сістэма рухавіка можа дасягнуць найлепшай прадукцыйнасці. Такім чынам, неабходна выбраць адпаведны алгарытм кіравання для дасягнення эфектыўнага рэгулявання хуткасці, каб сістэма прывада рухавіка магла працаваць у адносна шырокім дыяпазоне рэгулявання хуткасці і пастаяннай магутнасці.
Метад вектарнага кіравання шырока выкарыстоўваецца ў алгарытме кіравання хуткасцю рухавіка з пастаяннымі магнітамі. Ён мае такія перавагі, як шырокі дыяпазон рэгулявання хуткасці, высокая эфектыўнасць, высокая надзейнасць, добрая стабільнасць і добрыя эканамічныя выгады. Ён шырока выкарыстоўваецца ў маторных прывадах, чыгуначным транспарце і сервапрывадах станкоў. З-за розных ужыванняў, прынятая ў цяперашні час стратэгія вектарнага кіравання таксама адрозніваецца.
4. Характарыстыкі сінхроннага рухавіка з пастаяннымі магнітамі
Сінхронны рухавік з пастаяннымі магнітамі мае простую канструкцыю, нізкія страты і высокі каэфіцыент магутнасці. У параўнанні з рухавіком з электрычным узбуджэннем, з-за адсутнасці шчотак, камутатараў і іншых прылад не патрабуецца рэактыўны ток узбуджэння, таму ток статара і страты супраціўлення меншыя, эфектыўнасць вышэйшая, момант узбуджэння большы, а прадукцыйнасць кіравання лепшая. Аднак ёсць і недахопы, такія як высокі кошт і складанасць запуску. Дзякуючы выкарыстанню тэхналогій кіравання ў рухавіках, асабліва сістэм вектарнага кіравання, сінхронныя рухавікі з пастаяннымі магнітамі могуць дасягнуць шырокага дыяпазону рэгулявання хуткасці, хуткага дынамічнага водгуку і высокадакладнага кіравання пазіцыянаваннем, таму сінхронныя рухавікі з пастаяннымі магнітамі прыцягнуць больш людзей да правядзення шырокіх даследаванняў.
5. Тэхнічныя характарыстыкі сінхроннага рухавіка з пастаяннымі магнітамі Anhui Mingteng
а. Рухавік мае высокі каэфіцыент магутнасці і высокі каэфіцыент якасці электрасеткі. Кампенсатар каэфіцыента магутнасці не патрабуецца, і магутнасць абсталявання падстанцыі можа быць выкарыстана цалкам;
b. Рухавік з пастаяннымі магнітамі ўзбуджаецца пастаяннымі магнітамі і працуе сінхронна. Пульсацый хуткасці няма, і супраціўленне трубаправода не павялічваецца пры працы вентылятараў і помпаў;
c. Рухавік з пастаяннымі магнітамі можа быць распрацаваны з высокім пускавым момантам (больш чым у 3 разы) і высокай перагрузачнай здольнасцю па меры неабходнасці, тым самым вырашаючы з'яву "вялікі конь цягне маленькі воз";
d. Рэактыўны ток звычайнага асінхроннага рухавіка звычайна складае прыкладна ў 0,5-0,7 раза больш за намінальны ток. Сінхронны рухавік з пастаяннымі магнітамі Mingteng не патрабуе току ўзбуджэння. Рэактыўны ток рухавіка з пастаяннымі магнітамі і асінхроннага рухавіка адрозніваецца прыкладна на 50%, а фактычны працоўны ток прыкладна на 15% ніжэйшы, чым у асінхроннага рухавіка;
е. Рухавік можа быць распрацаваны для непасрэднага запуску, а знешнія памеры ўстаноўкі такія ж, як і ў шырока выкарыстоўваных у цяперашні час асінхронных рухавікоў, якія могуць цалкам замяніць асінхронныя рухавікі;
f. Даданне драйвера можа дасягнуць плаўнага пуску, плаўнага прыпынку і бесступеньчатага рэгулявання хуткасці з добрай дынамічнай рэакцыяй і далейшым паляпшэннем энергазберажэння;
g. Рухавік мае мноства тапалагічных структур, якія непасрэдна адпавядаюць асноўным патрабаванням механічнага абсталявання ў шырокім дыяпазоне і ў экстрэмальных умовах;
h. Для павышэння эфектыўнасці сістэмы, скарачэння ланцуга перадачы і зніжэння выдаткаў на тэхнічнае абслугоўванне могуць быць распрацаваны і выраблены высакахуткасныя і нізкахуткасныя сінхронныя рухавікі з прамым прывадам і пастаяннымі магнітамі ў адпаведнасці з больш высокімі патрабаваннямі карыстальнікаў.
ТАА «Anhui Mingteng Permanent-Magnetic Machinery&Electrical Equipment» (https://www.mingtengmotor.com/) была заснавана ў 2007 годзе. Гэта высокатэхналагічнае прадпрыемства, якое спецыялізуецца на даследаваннях і распрацоўках, вытворчасці і продажы звышвысокаэфектыўных сінхронных рухавікоў з пастаяннымі магнітамі. Кампанія выкарыстоўвае сучасную тэорыю праектавання рухавікоў, прафесійнае праграмнае забеспячэнне для праектавання і ўласную праграму праектавання рухавікоў з пастаяннымі магнітамі для мадэлявання электрамагнітнага поля, поля вадкасці, тэмпературнага поля, поля напружанняў і г.д. рухавіка з пастаяннымі магнітамі, аптымізацыі структуры магнітнага ланцуга, павышэння ўзроўню энергаэфектыўнасці рухавіка і фундаментальнага забеспячэння надзейнага выкарыстання рухавіка з пастаяннымі магнітамі.
Аўтарскае права: Гэты артыкул з'яўляецца перадрукам публічнага нумара WeChat «Motor Alliance», арыгінальная спасылкаhttps://mp.weixin.qq.com/s/tROOkT3pQwZtnHJT4Ji0Cg
Гэты артыкул не адлюстроўвае погляды нашай кампаніі. Калі ў вас ёсць іншыя меркаванні ці погляды, калі ласка, папраўце нас!
Час публікацыі: 14 верасня 2024 г.